Visualización en Arduino de BIS con MicroPython
Visualización en Arduino de BIS con MicroPython
Actualizado: 4 minuto de lectura
Visualización en Arduino de BIS con MicroPython
Introducción
Ver Introducción del Internet de las Cosas en artículo anterior de Visualización en Arduino de la Barra de Información del Sistema
Objetivo
En este artículo se mostrará como automatizar el despliegue de la información que está almacenada en un archivo de texto en un servidor de páginas en Internet, el cual es actualizado por el programa Barra de Información del Sistema, utilizando MicroPython.

MicroPython es una implementación ágil y eficiente del lenguaje de programación Python 3 que incluye un pequeño subconjunto de la biblioteca estándar de Python y está optimizado para ejecutarse en microcontroladores y en entornos restringidos.
El MicroPython pyboard es una placa de circuito electrónico compacto que ejecuta MicroPython en el metal desnudo, brindándole un sistema operativo Python de bajo nivel que se puede usar para controlar todo tipo de proyectos electrónicos.
MicroPython está repleto de características avanzadas, como un indicador interactivo, enteros arbitrarios de precisión, cierres, comprensión de listas, generadores, manejo de excepciones y más. Sin embargo, es lo suficientemente compacto como para caber y ejecutarse en solo 256k de espacio de código y 16k de RAM.
MicroPython pretende ser lo más compatible posible con Python normal para permitirle transferir código fácilmente desde el escritorio a un microcontrolador o sistema integrado.
Software
- Herramientas
- Diseño
- Librerias
- esp8266_i2c_lcd.py (lcd_api and i2c_lcd)
- lcd_api.py (lcd_api and i2c_lcd)
Hardware
- Arduino ESP8266 NodeMCU
$9.49 ESP8266 NodeMCU en

- LCD 20x4
$15.00 Pantalla LCD 20x4 en

- Cables Hembra - Hembra
$5.20 Cables Hembra - Hembra en
Código
- Repositorio en Github
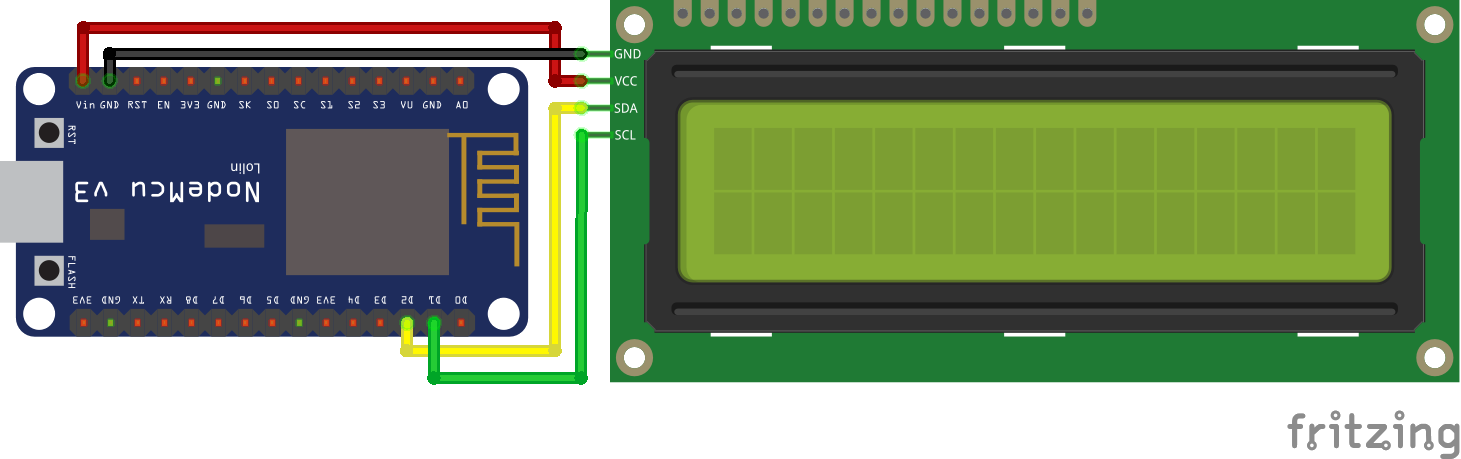
- Fritzing
- ampy
-
Configuración
Item Valor Puerto Asignado por driver Velocidad 115200 SSID Asignado por usuario Contraseña Asignado por usuario -
Display_on_Arduino_of_System_Information_Bar_-_esp8266_nodemcu.py
# Display_on_Arduino_of_System_Information_Bar_-_esp8266_nodemcu.py # v0.0.1 - 2018-11-12 - nelbren.com from machine import Pin, I2C from esp8266_i2c_lcd import I2cLcd import network, utime, urequests as requests import wifi link = "http://104.251.217.217/si.txt" LCD_COLS,LCD_ROWS = 20,4; n = 0 i2c = I2C(scl=Pin(5), sda=Pin(4), freq=100000) lcd = I2cLcd(i2c, 0x27, LCD_ROWS, LCD_COLS) def wait_time(): lcd.blink_cursor_off() lcd.move_to(LCD_COLS - 3, LCD_ROWS - 1) lcd.putstr('{:03}'.format(n)) lcd.move_to(LCD_COLS - 1, LCD_ROWS - 1) lcd.blink_cursor_on() def lcd_print(msg, r = 0): lcd.move_to(0, r) if len(msg) > LCD_COLS: if r >= LCD_ROWS - 1: lcd.putstr(msg[0:LCD_COLS - 3] + "...") else: lcd.putstr(msg[0:LCD_COLS]) lcd_print(msg[LCD_COLS:], r + 1) else: lcd.putstr(msg) def setup(): lcd.backlight_on() lcd_print("SSID: " + wifi.SSID, 0) nic = network.WLAN(network.STA_IF) nic.active(True) nic.connect(wifi.SSID, wifi.PASSWORD) n = 0 while not nic.isconnected(): lcd_print('{:020}'.format(n), 1) utime.sleep(1) n+=1 lcd.clear() lcd_print("MYIP: " + nic.ifconfig()[0]) def display_error(msg, nn): global n lcd.clear() lcd_print(msg) lcd.backlight_on() n = nn setup() while True: wait_time() if n <= 0: n = 120 try: r = requests.get(link) except: display_error('Communication error', 5) pass else: if r.status_code == 200: lcd.backlight_on() lcd_print(r.text) utime.sleep(2) if r.text.find('*') == -1: lcd.backlight_off() r.close() else: display_error('Get failed!', 5) else: utime.sleep(1) n-=1 -
Display_on_Arduino_of_System_Information_Bar_-_esp8266_nodemcu.py
-
- Fritzing
Uso
- Obtener
git clone https://github.com/nelbren/display_on_arduino_of_sib_with_micropython.gitSalida:
Cloning into 'display_on_arduino_of_sib_with_micropython'... remote: Enumerating objects: 33, done. remote: Counting objects: 100% (33/33), done. remote: Compressing objects: 100% (26/26), done. remote: Total 33 (delta 8), reused 32 (delta 7), pack-reused 0 Unpacking objects: 100% (33/33), done. - Configuración
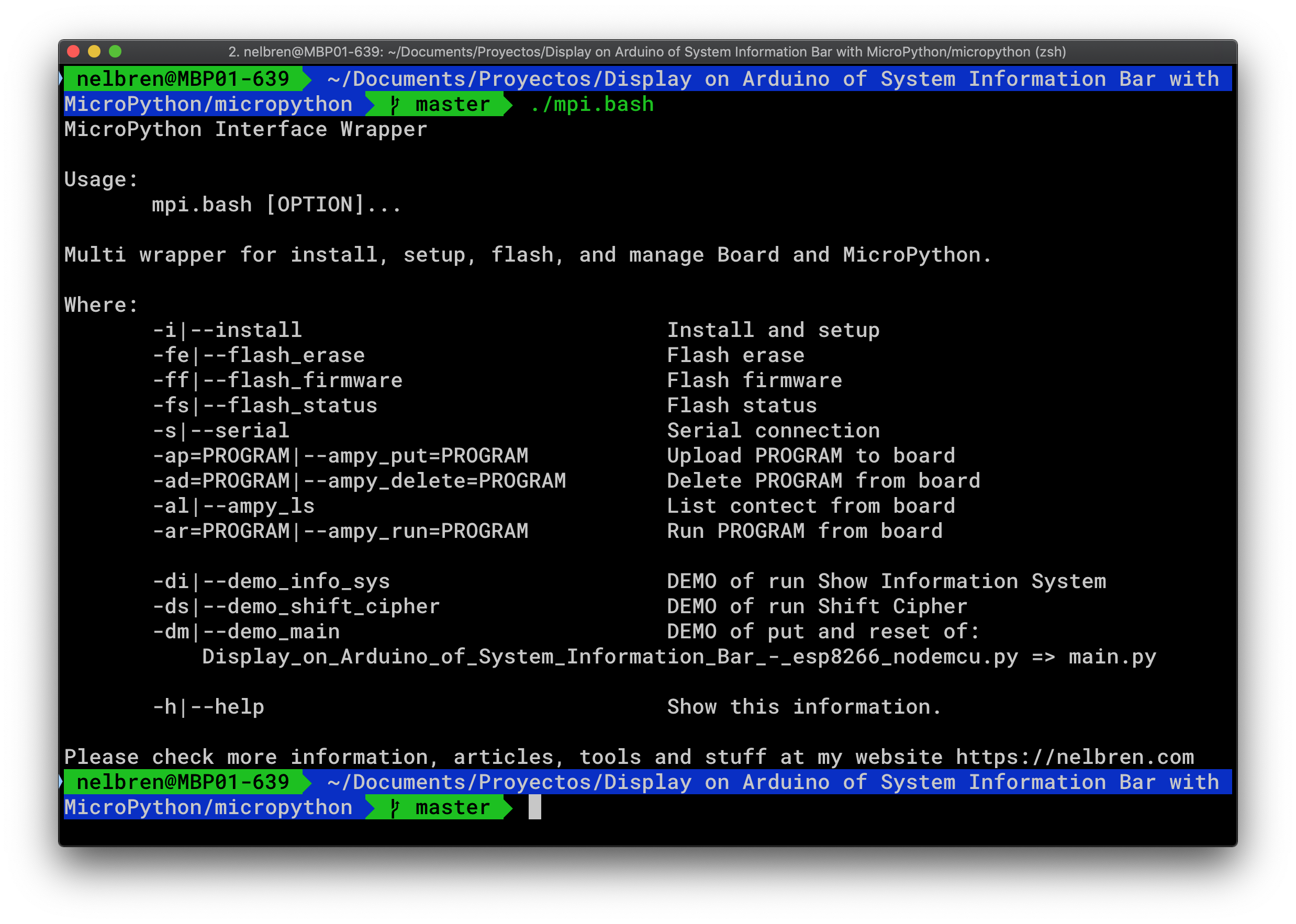
cd display_on_arduino_of_sib_with_micropython/micropython ./mpi.bashSalida:
Please copy 'cfg.bash.example' to 'cfg.bash', and change wifi and port configcp cfg.bash.example cfg.bashNOTA: Cambiar el valor de
porten el archivo cfg.bash - Flash
- Borrar
./mpi.bash -feSalida:
Sure? (Yes/Any=No): Yes esptool.py v2.5.1 Serial port /dev/cu.SLAB_USBtoUART Connecting........_ Detecting chip type... ESP8266 Chip is ESP8266EX Features: WiFi MAC: 84:f3:eb:XX:XX:XX Uploading stub... Running stub... Stub running... Erasing flash (this may take a while)... Chip erase completed successfully in 6.9s Hard resetting via RTS pin... - Cargar el Firmware
./mpi.bash -ffSalida:
Sure? (Yes/Any=No): Yes esptool.py v2.5.1 Serial port /dev/cu.SLAB_USBtoUART Connecting........_ Detecting chip type... ESP8266 Chip is ESP8266EX Features: WiFi MAC: 84:f3:eb:XX:XX:XX Uploading stub... Running stub... Stub running... Configuring flash size... Auto-detected Flash size: 4MB Flash params set to 0x0040 Compressed 604872 bytes to 394893... Wrote 604872 bytes (394893 compressed) at 0x00000000 in 34.9 seconds (effective 138.6 kbit/s)... Hash of data verified. | Leaving... Hard resetting via RTS pin...
- Borrar
- Conexión serial
./mpi.bash -sSalida:
>> import os >> print(os.listdir()) ['boot.py'] >> print('hello world!') hello world! >> print('for quit of screen press CONTROL+A and type :quit') for quit of screen press CONTROL+A and type :quit >> - Demos
- Listar contenido
./mpi.bash -alSalida:
/boot.py - Información del Sistema
./mpi.bash -diSalida:
run mysources/info.py: Platform: esp8266 Version: 3.4.0 Modules: {'flashbdev': <module 'flashbdev'>} Uname: (sysname='esp8266', nodename='esp8266', release='2.2.0-dev(9422289)', version='v1.9.4-8-ga9a3caad0 on 2018-05-11', machine='ESP module with ESP8266') MAC address: 84:f3:eb:xx:xx:xx Memory free: 24544 bytes Frequency: 80000000 hz Count 5K ms: 56210 Frequency: 160000000 hz Count 5K ms: 97798 Frequency: 80000000 hz Count 5K ms: 56042 DONE. - Shift Cipher
./mpi.bash -dsSalida:
RUN BOARD: ========== run mysources/160Mhz.py: DONE. intento 00: PHHW PH DIWHU WKH WRJD SDUWB ... intento 24: NFFU NF BGUFS UIF UPHB QBSUZ | real 0m3.512s user 0m0.130s sys 0m0.057s run mysources/080Mhz.py: DONE. intento 00: PHHW PH DIWHU WKH WRJD SDUWB ... intento 24: NFFU NF BGUFS UIF UPHB QBSUZ | real 0m3.915s user 0m0.132s sys 0m0.061s | RUN LOCAL: ---------- intento 00: PHHW PH DIWHU WKH WRJD SDUWB ... intento 24: NFFU NF BGUFS UIF UPHB QBSUZ | real 0m0.129s user 0m0.021s sys 0m0.041s
- Listar contenido
- Display on Arduino of System Information Bar with Micropython
- Configuración de Wifi
- SSID
./mpi.bash -dmSalida:
Please configure the 'main_ssid' in 'cfg.bash'NOTA: Cambiar el valor de
main_ssiden el archivo cfg.bash - Contraseña
./mpi.bash -dmSalida:
Please configure the 'main_pass' in 'cfg.bash'NOTA: Cambiar el valor de
main_passen el archivo cfg.bash
- SSID
- Subir el programa
./mpi.bash -dmSalida:
put esp8266_i2c_lcd.py...uploading: put resources/esp8266_i2c_lcd.py...DONE. put lcd_api.py...uploading: put resources/lcd_api.py...DONE. put mysources/wifi.py...DONE. put mysources/main.py...DONE. run mysources/reset.py...DONE.
- Configuración de Wifi
Actualización de archivo de texto
Ver Actualización de archivo de texto en artículo anterior de Visualización en Arduino de la Barra de Información del Sistema